
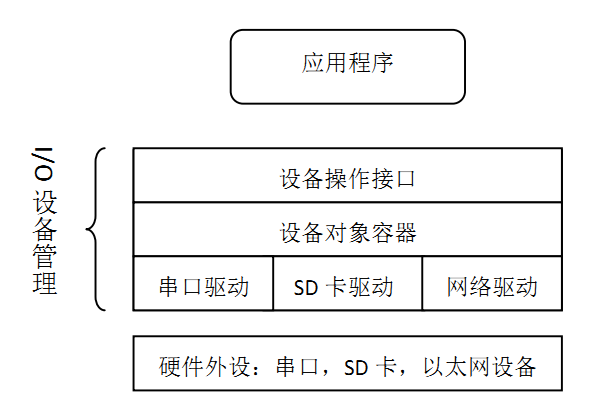
rt-thread 设备驱动
裸机的“驱动”
void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init);void HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);
GPIO_PinState HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);rt_size_t rt_device_read(rt_device_t dev, rt_off_t pos,void* buffer, rt_size_t size);
rt_size_t rt_device_write(rt_device_t dev, rt_off_t pos,const void* buffer, rt_size_t size);
rt_err_t rt_device_control(rt_device_t dev, rt_uint8_t cmd, void* arg);struct rt_device
{
struct rt_object parent; /**< inherit from rt_object */
enum rt_device_class_type type; /**< device type */
rt_uint16_t flag; /**< device flag */
rt_uint16_t open_flag; /**< device open flag */
rt_uint8_t ref_count; /**< reference count */
rt_uint8_t device_id; /**< 0 - 255 */
/* device call back */
rt_err_t (*rx_indicate)(rt_device_t dev, rt_size_t size);
rt_err_t (*tx_complete)(rt_device_t dev, void *buffer);
#ifdef RT_USING_DEVICE_OPS
const struct rt_device_ops *ops;
#else
/* common device interface */
rt_err_t (*init) (rt_device_t dev);
rt_err_t (*open) (rt_device_t dev, rt_uint16_t oflag);
rt_err_t (*close) (rt_device_t dev);
rt_size_t (*read) (rt_device_t dev, rt_off_t pos, void *buffer, rt_size_t size);
rt_size_t (*write) (rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size);
rt_err_t (*control)(rt_device_t dev, int cmd, void *args);
#endif /* RT_USING_DEVICE_OPS */
#ifdef RT_USING_POSIX_DEVIO
const struct dfs_file_ops *fops;
struct rt_wqueue wait_queue;
#endif /* RT_USING_POSIX_DEVIO */
void *user_data; /**< device private data */
};
typedef struct rt_device *rt_device_t;STM32系列驱动介绍
最后更新于