
7.os kernel 实现
我们已经了解并发编程实践需要的几乎全部内容——线程、内存模型、互斥、同步和并发 bugs 的应对。但我们一直是在简化的线程模型 (thread.h) 上讲解的。但我们还没有回答一个关键问题:线程到底在计算机硬件上是如何实现的?即便系统中只有一个处理器,我们依然可以创建很多并发执行的线程。
讲并发,操作系统课,并不是编程课,为什么花这么多时间讲并发编程?
我们前面都是在简化的 api 上学习的,这部分我们考虑线程库如何实现?即便系统中只有一个处理器,我们依然可以创建很多并发执行的线程。
中断的机制奠定了现代操作系统的基础。
多处理器与中断
50行实现嵌入式操作系统
线程库是怎么实现的?操作系统内核里如何实现线程。
多处理器模型
做实验的时候,有个 AbstractMachine 的框架
AbstractMachine 的实验框架,使用 am.h 里的 api 可以直接使用 C 控制计算机硬件去控制一个操作系统内核。lab 的名字是 kernel,去实现一个小的 在 bare metal 上的 操作系统。
这一切的基础,Turing Machine,图灵机模型。一个有限状态机+一条纸带
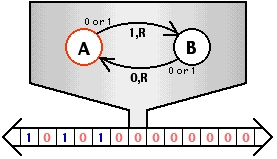
读取当前的状态,然后根据状态找到下一个状态,还可以写出去。这个效果是在无限长的纸带写出 010101 就好像编了一个程序。
计算机科学领域里有个非常重要的定理:图灵机的表达能力非常强,强到我们可以写一个图灵机的程序去模拟另外一个图灵机。
我们可以做一台图灵机,可以解释执行写在纸上的 C 程序,这些都是可以证明的。
Turing Machine: 一个处理器,一个地址空间
“无情的执行指令的机器” (rvemu) 的抽象
可用的内存是静态变量和 heap
只能执行计算指令和 putch, halt
(模拟器,指令的模拟执行)
risc-v 的模拟器,无情的执行指令的机器。从手册 reset 规定好的地方开始,不断执行。有限状态机上有个状态是停机,有个有意思的问题:halting problem,即能否写一个程序,这个程序可以输入另外一个程序,会不会在有限步内终止。这是个不可判定问题,即无法用图灵机解决。
这个简单的 risc-v 的指令模拟器,绝大多数指令都是计算指令
多处理器就不一样了,多个处理器的 mpe 功能,AbstractMachine 每个处理器类似一个线程,多个处理器共享一个地址空间,状态机模型也发生了一点变化。
状态:共享内存和每个处理器的内部状态
多处理器上,机器是不确定的执行指令的机器
状态迁移:处理器 t 分隔出一个 “单处理器计算机”
任一时刻,我们可以让其中一个处理器带着内存往前走一步。这就让状态机变得非常复杂,也变得不符合直觉了。
简易的多处理器内核(L1 的模型),和多线程程序一致,同步通过原子指令实现
uint8_t shm[MEM_SIZE]; // Shared memory
void Tprocessor() {
struct cpu_state s;
while (1) {
fetch_decode_exec(&s, shm);
}
}
int main() {
for (int i = 0; i < NPROC; i++) {
create(Tprocessor);
}代码模拟的简易的多处理器系统模型容易理解,但同时也有缺陷:它上似乎没办法运行任何 “正经” 的操作系统:如果任何处理器上的应用程序死循环,那么这个处理器就彻底 “卡死” 了。而使真正得我们的线程可以 “逃出” 死循环的核心机制,就是操作系统管理的硬件中断。
中断机制
如果模拟的这个简易处理器,一旦某个 CPU 运行了死循环,直接卡死,这个 CPU 就和消失一样。
这和我们的直觉不同,为什么我们写 C 程序,while(1) 为什么不会卡死 CPU 呢?
为此,我们需要引入 CPU 的一个重要机制:中断。
8086 里有中断,我们如何理解中断这个行为呢。
中断在硬件上就是一根信号线。边沿触发或者低电平触发
面包板上搭 74 处理器的电路,手作的乐趣,是写 verilog 感受不到的。
中断告诉 CPU 有事情来了,不管你在干什么,都停下来。停下来以后的行为,由处理器确定。
实际的处理器并不是 “无情地执行指令”
无情的执行指令
同时有情地响应外部的打断
每个指令周期的结束都会检测中断信号。
中断有两个脚, 和 不可屏蔽中断。
中断发生了,应该干什么,即中断的响应
首先检查处理器配置是否允许中断(相关寄存器的配置)
如果处理器关闭中断,则忽略(IF=1)
x86 Family
询问中断控制器获得中断号 n
保存 CS, RIP, RFLAGS, SS, RSP 到堆栈
跳转到 IDT[n] 指定的地址,并设置处理器状态 (例如关闭中断)
RISC-V (M-Mode)
检查 mie 是否屏蔽此次中断
跳转 PC = (mtvec & ~0xf)
更新 mcause.Interrupt = 1
跳转这个行为以为着不正常。中断响应 x86 做的多一点,有点像强行插入了一个函数跳转,这个地址是我们可以设置的,即此函数可以任意实现。RISC-V 流程基本上也相差不大。
教科书到此为止了。如果想更深入,需要去写能执行的代码,即实现一个模拟器。
struct MiniRV32IMAState {
uint32_t regs[32], pc;
uint32_t mstatus;
uint32_t cyclel, cycleh;
uint32_t timerl, timerh, timermatchl, timermatchh;
uint32_t mscratch, mtvec, mie, mip;
uint32_t mepc, mtval, mcause;
// Note: only a few bits are used. (Machine = 3, User = 0)
// Bits 0..1 = privilege.
// Bit 2 = WFI (Wait for interrupt)
// Bit 3+ = Load/Store reservation LSBs.
uint32_t extraflags;
};这个 CPU 有 32 个 32 bit 寄存器,一个 pc 寄存器,以及一段其它寄存器,以及一个死循环,模拟一步指令执行,以及最主要的,中断。这个简单模拟器里关于中断的代码就十几行,有助于对中断的理解。
中断是奠定操作系统“霸主地位”的机制,操作系统具有中断的完整控制权,随意开关,然而应用程序做不到,这就意味着即使是死循环也可以被中断打断,然后操作系统的代码就开始执行了。
如果想强行在用户程序里关中断会怎么样呢?
int main()
{
asm volatile("cli");
}会报一个段错误。x86 在保护模式下,应用程序执行了非法操作,也会触发一个中断告知操作系统,然后报错。
框架代码里的中断 api,
bool cte_init(Context *(*handler)(Event ev, Context *ctx));
bool ienabled(void);
void iset(bool enable);检查是否开了中断,然后提供了一个设置中断函数的 api。这使得我们使用框架代码学习操作系统的时候不需要写汇编语言了。
每当中断发生的时候,就跳转到了框架代码执行,在 cte_init 传入了事件原因,然后还保存了上下文。操作系统最早的并发性就来自于并发,如中断处理中访问了共享数据,所有有些教科书上会说关闭中断就能实现互斥。单处理器系统上,关了中断永远也不会和别人并发,就可以安全的把一个数据结构做完操作,然后打开中断。这也是 MCU 上跑的 RTOS 实现互斥的方式。
最早操作系统的并发性就是来自于中断 (而不是多处理器)
关闭中断就能实现互斥
系统中只有一个处理器,永远不会被打断
关中断实现了 “stop the world”
一个真正的计算机系统模型,不仅仅有多处理器,还有中断,每个 CPU 都可以中断。数据竞争到处都有可能发生。
理解了中断,结合前面,就有了一个有趣的挑战,如何实现一个中断安全的自旋锁?
这个事情没那么简单,中断和多处理器是两个并发来源。
AA 型的死锁,哪怕我们在 lock 的时候关中断,unlock 的时候开中断,也有可能会有问题。
50 行代码实现操作系统内核
中断还能来做什么呢?框架代码里的 API
Context *handler(Event ev, Context *ctx) {
...
}一个参数是 Event ev 告诉是什么类型的中断,还有个 Context *ctx ,来研究这个参数。
一个程序执行流,往前走,突然来了个中断,不管我们执行了什么代码,中断程序是可以任意修改寄存器的,即原来代码里放在寄存器里的东西会被破坏。
所以框架代码需要考虑这个事情并妥善处理,所以框架代码干了更多的事情。
如何让被中断的代码回到原来的状态去执行?即要保存原来的状态,中断发生的时候保存,返回的时候,handler 就返回了需要恢复的寄存器的数据所在的地址。
这是一个非常小心的操作,每恢复一个寄存器,这个寄存器就不能再用了,所以这部分代码是操作系统里很有趣,也很精巧的代码,即上下文切换的代码。
x86-64 下的 Context
#ifndef ARCH_H__
#define ARCH_H__
struct Context{
void *cr3;
uint64_t rax, rbx, rcx, rdx,
rbp, rsi, rdi,
r8, r9, r10, r11,
r12, r13, r14, r15,
rip, cs, rflags,
rsp, ss, rsp0;
}
#define GPR1 rdi
#define GPR2 rsi
#define GPR3 rdx
#define GPR4 rcx
#define GPRx rax
#endif一些比较特殊的寄存器 rip,
程序的状态,一个程序要可以运行起来,关键的地方 rip 此程序的代码,rsp 指向此程序的栈,这些都是程序独有的,实打实存在的内存,如何在只有一个 CPU 的情况下,放两个程序执行?
只要把两个程序的代码,数据、堆栈,都放到内存里。当然对于线程来说代码和数据是共享的,堆栈独享。
只要把两个线程的寄存器都放在内存里,中断的时候,把需要的数据般上去。
所以在中断处理程序开始执行时,所有可以被执行的线程,所有的内存、寄存器都在内存里,所有的线程看起来一样,随便把那个线程的寄存器往 CPU 上一贴,这个线程就开始执行了。
这就是现代操作系统实现分时的方法。
这就是上下文切换,状态机在执行……
发生了中断
操作系统代码开始执行
状态机被 “封存”
我们可以用代码 “切换” 到另一个状态机
中断返回另一个状态机的状态
“封存” 的状态还在
下次可以被恢复到处理器上执行
看代码,我们如何表示一个线程?线程就是一个数据结构,这个数据结构的定义
typedef union task {
struct {
const char *name;
union task *next;
void (*entry)(void *);
Context *context;
};
uint8_t stack[8192];
} Task; // A "state machine"定义了名字、下一个线程、入口、以及私有的一个栈,整个数据结构 8kb,正好栈还是往数据头的方向在增长。
现在的 RTOS 都是这么设计的,可以直接去看看现在正在用的,跑在单核 MCU 上的 RTOS 内核,可以实际的调试一块板子上的东西,更好玩。
比在 unbuntu 用 abstract machine 更有感觉。
当然这是个一通百通的事情,原理就是这么个原理,具体实现各有不同,研究通一个再看类似的也会很容易。
当然这个地方是个难点。在做了 “状态机” 和 “并发” 足够的铺垫后,我们终于回到了机器指令 (状态机) 和操作系统内核了。本次课回答了为什么 while (1) 不会把操作系统 “卡死”:
在操作系统代码切换到应用程序执行时,操作系统内核会打开中断
“不可信任” 的应用程序定期会收到时钟中断被打断,且应用程序无权配置中断
操作系统接管中断后,可以切换到另一个程序执行
要更深入的理解,还是得去读代码,这个过程必不可少,毕竟学习理论最终也是为了能更容易理解代码在干什么。
某种意义上讲,CPU 是一个状态机的容器,并不在意执行那段代码,操作系统把状态机放在 CPU 这个容器上,状态机就开始往前走了。
最后更新于
这有帮助吗?